2016-12-09 12:12:44
来源:
差分就是把GPS的误差想方设法分离出去。
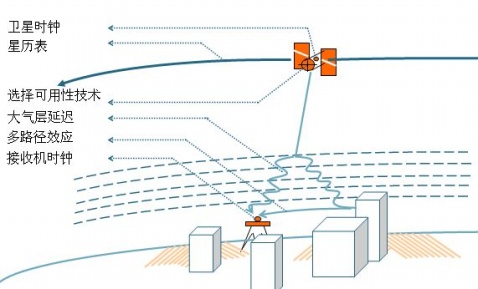
GPS信号从遥远的太空赶到地面,尤其要穿过电离层、路途上难免有差池。所以普通的GPS定位总有数米的误差。
有天才的人类想到:可以在已知位置的参考点上装上GPS,就能知道GPS的偏差。将这个偏差用电台发送给需要定位的GPS设备,用户就可以获得更精准的位置。
分析误差的方式有定位结果(位置差分)、与卫星的距离(伪距差分)、GPS的载波相位(载波相位差分,即RTK)。分析的越深入,就越麻烦、越贵,但是精度也更高。
其实将无人机系统装上差分GPS并不稀奇,许多科研院所都有这样的项目,但因为成本与需求问题并没有多少投入商用。最近一段时间差分似乎有种普及化的趋势,而且各家所使用的差分技术都是最复杂的RTK。
差分也分许多等级,之前用途比较广泛的是伪距差分,误差半米左右;而RTK也分两种:几十厘米误差的单频RTK与厘米级的双频RTK。
双频GPS的意义是消除电离层误差,所以双频RTK可以达到厘米级的定位精度。一般厂家会宣称其精度为:1cm+1ppm(与基准站距离的百万分之一),但是注意:这也是个理想值:只有在10公里以内才近似成立,与基准站距离远了,精度也会迅速下降。
常用的这种差分设备都是与地面的基准站做校准,所以这些所谓的精度都不是相对地球的精度,而是相对于基准站的精度。基准站位置不准也是白搭。
基准站位置的确定大体有这么几种方式:①建立在国家已知点上;②建立在从国家已知点上引过来的点;③建立在一个长期观测的点上。
然而河北铭宇电子科技的技术人员却对环球网无人机频道表示:在外边作业很少有能碰到国家已知点上。只能选择一个开阔的地方,如楼顶长期观测。
业内人士表示:这就相当于多次测量求平均值,在20-30分钟后结果会收敛;持续时间越长精度就越高。但是最后依然会有米级误差。
另外,差分依然要注意多路径效应,也就是没法拦住GPS信号“走冤枉路”。所以差分GPS的基准站要在开阔的地方,最好在楼顶;无人机飞行也最好避开高大建筑物。
此外,定位精度是一方面、控制精度又是另一方面;飞控的可靠性还是一个方面。光有精准的定位结果未必就能干好活儿。
差分很麻烦,而且很贵。即使是技术简单、成本低廉的多旋翼飞控,加上差分也要数万元。但依然有许多无人机使用差分设备,各行业应用不是被“厘米级精度”的广告语所吸引,而是秉承“够用就好”的信条。
为无人机做差分之前就在航测(航空摄影测量)方面拥有广泛的应用,配备精准的定位设备的无人机虽然采购成本高、但是可以降低后期的使用成本。但测绘用的精确位置在拍完之后知道也不迟,所以用后处理的方法提高精度也可以。
还有许多雷达的标校也是以挂载龙伯球的无人机为靶标,雷达标校无人机也都挂载高精度的差分GPS/北斗定位系统。但是雷达标校的特点是不关心绝对精度,只关心相对位置。因为雷达的参考系是“雷达站心坐标系”,雷达以“自我为中心”,所以基准站只要放在雷达站附近,随便哪里都可以,精确位置不重要。
利用差分GPS还有一个比较有创意的运用:侧向。大型有人飞机、舰船等将两端各装个GPS天线可以实现侧向;而对于小尺寸的无人机使用高精度的差分技术也能做到,这个时候也不关心绝对精度、而是只关心一个天线相对于另一个天线的位置。
而其它行业提高无人机的定位精度,还有一种效费比更高的方式:换一个性能好一点的GPS天线。