2017-10-23 10:48:00
来源:
作为安防系统重要的安全防范系统之一,基于雷达技术的智能周界入侵探测系统是提高预警能力的有效技术防范措施,要求对远距离闯入虚拟围界的行为及时发出报警和警告以达到及时处置和防范的目的,确保区域安全。
基于雷达技术的智能周界入侵探测系统的前端由分布式智能雷达探测器节点组成,辅助以视频复核手段(由周界安防管理平台后台实现)实现融合感知、协同探测,克服传统探测手段单一、误报率高、安全性差的缺点,同时可联动视频、声光及广播等设备。系统对围界进行全天时动态智能感知,具备很强的环境适应性和智能性,提高全天候、全天时的检测性能,降低虚警、漏警率。
系统由前端探测分系统、联动控制分系统、网络传输分系统、控制中心分系统(系统集成平台)。

雷达周界报警系统效果图
前端探测分系统主要由雷达探测器组成。通过对信号的采集、分析、融合,完成报警输出,同时可以结合天气站及第三方报警手段,在控制中心报警处理功能模块实现第二级算法融合,最终输出报警事件,完成报警联动。
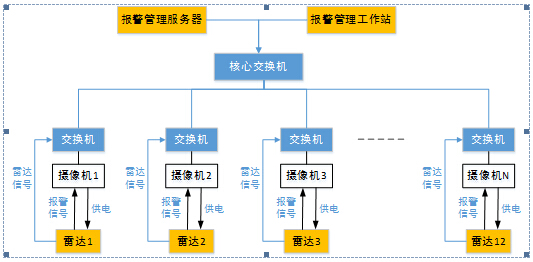
(系统架构图)
雷达报警沿围界向外延伸5米设置探测报警区,高2-6米,当有人进入报警区域时:
Ø 系统自动检测到人体移动
Ø 自动定位入侵者在预警区的位置;
Ø 自动在电子地图上显示入侵者的位置;
自动记录警情及自动转发报警信息;
1.1.2.1 目标探测
采用IR-UWB冲激超宽带脉冲发射信号,使用收发一体和邻近收发融合的复合式传感器技术。雷达采用一维成像技术,每两台邻近雷达构成二维成像,通过实时计算发射信号和不同距离门限上的背景变化,从而对入侵目标进行高探测率的连续识别,在雷达天线传感器的发射接收范围可实现大范围目标入侵探测。
1.1.2.2 目标定位
雷达通过计算雷达发射源、目标、雷达接收端的飞行时间,可实时探测目标的距离信息。雷达的天线结构采用多发多收装置,针对入侵目标,可以测量得到目标到雷达的距离,每两个邻近雷达测量到的目标距离相交,利用环境三角关系,以雷达天线阵面法线方向为基础参考面,可以得到目标的真实位置关系。
1.1.2.3 目标跟踪
采用卡尔曼跟踪算法,雷达能够对持续跟踪目标的连续运动。
1.1.2.4 防区划分
雷达可连续跟踪目标的位置坐标,用户设置任意多边形防区,保证只有出现在防区的目标,才会输出报警信息。
Ø 雷达采用3~6GHz超宽带频段,采用宽温设计,不受雨、雪、雾、沙尘、大风等恶劣天气影响,不受外部电子干扰,适用于复杂地面环境中的运动目标探测。
Ø 雷达由阵列天线,固态微波射频组件、FPGA基带信号处理平台和ARM总控系统构成,系统采用先进的雷达信号处理算法,实时学习周围背景环境变化,能够在90米长X5米宽度的探测区域内快速发现并同时跟踪目标,电子扫描刷新频率<100毫秒。
Ø 雷达可实时测量入侵目标的距离、速度、方位角,测距精度为50厘米,测角精度0.3度,探测率大于99%,误报率<1个/天。
Ø 雷达支持12个可选工作频点,相邻设备采用不同的工作频点,避免自身信号干扰。
Ø 雷达数据回传采用以太网网络结构,内置防浪涌保护,具有通信抗干扰能力。
Ø 每台雷达通过通过武警岗楼布设的交换机连接到指挥中心的PSIM-2020雷达报警管理平台,实现报警管理和配置管理。
Ø 所有雷达都采用12VDC供电,供电距离<100米。网线敷设距离<100米。
雷达具体点位设计如下:

前端探测器点位布防图
1.1.4.1 联动控制
联动控制分系统完成报警事件的联动控制,主要包括前端联动设备及后台集成管理系统的联动部分(在雷达中心分系统描述)。前端联动设备主要由雷达联动输出继电器、摄像机、探照灯、声光报警器组成。
当系统发生报警事件时,后台集成管理系统按照系统预设的联动策略,与前端视频设备联动,可以自动调出报警防区、相邻防区的视频画面,使操作人员能迅速、直观地掌握现场的一切情况,选择是否采取相应的行动;在夜晚或光线不足的情况下,打开探照灯给视频复核提供足够的亮度,使其现场画面清楚,其在报警情况下的开启亦被视为联动控制动作。
每台雷达直接输出继电器联动接口,与警灯相连,按照联动策略,达到自动联动目的。监控中心也可远程手动控制继电器的输出状态,强制关闭或打开警灯。
每台微波雷达外壳壳体上安装有红色LED警灯灯带,同时可以支持外部音箱直接接入雷达音频输出接口,报警后可发出LED警灯灯带闪烁,音频可以输出自动播放语录好的语音文件,实现威慑作用。
1.1.4.2 网络传输
整个系统设计中采用了屏蔽10/100Mbps以太网,用于连接雷达到武警岗楼交换机,然后通过传输主干网络到指挥中心。
1.1.4.3 中心管理
雷达报警管理软件,可以实现了各分系统之间的联动,一旦发生突发事件,可以联动调阅各种想要了解的信息,可以通过平台的电子地图查看突发事件发生地点的视音频资料、人力分布情况、执行设备信息等,都能实时显示在指挥中心的大屏上,对重要部位或重要事件启动紧急预案,以便警情的分析判断和及时处置。
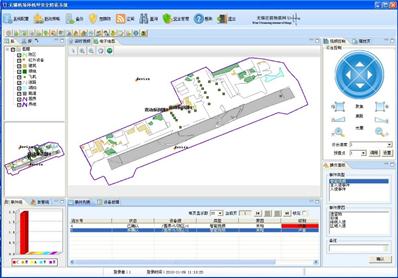
(平台运行效果图)
雷达报警管理软件有下述特点:
对操作人员:提供更便捷的工作方式。一台终端上可以掌控全部子系统,系统界面更加直观,各子系统之间信息共享并实现自动联动;不需要在不同的子系统、不同的应用画面之间来回往复切换,降低劳动强度,提高工作效率。
对指挥中心人员:提供更全面、更及时的现场信息。在指挥中心内,能够一目了然地看到所有雷达场景(地理空间信息+诸音视频信息),及时获知事件告警及辅助信息,能够将指挥命令下发到现场的每个系统、人员和设备;改变以往指挥中心信息获取和沟通不利的局面。
对系统维护人员:提供低成本的维护方式。在一个平台上能够配置和管理所有的安防设备及系统,避免将过多精力用于适应各个子系统界面风格、技术路线等方面的差异,无需投入大量人力物力用于进行系统的升级工作及日常管理。
雷达报警管理软件分为服务器端和客户端。综合管理平台服务器是既有业务逻辑处理功能,又有网络管理功能,包括:1)对雷达报警和红外报警的融合处理;2)管理自身及以下的网络设备,包括探测器、汇聚设备、网络设备或其他辅助设备等。网络管理功能主要内容包括配置管理、事件和性能管理、性能管理、操作维护管理和业务数据透传。综合管理平台中各功能模块均具有开放的通讯接口,可通过TCP/IP、API协议接口、数据库共享等方式互相通信,并完成分布式部署。每个分系统以各自的主控系统为中心,独立工作,同时通过集成与其它分系统有机地协同工作、联动防范,构成一个完整的防区安全技术防范体系。本系统是 “目标驱动”型的新型围界安防系统,以多种探测手段组成协同感知的网络,实现全新的目标识别、多点融合和协同感知。
集成管理平台实现围界逃跑目标检测、识别及定位,并能准确区分逃跑者与非逃跑行为。当上述逃跑行为触发报警时,系统立即调用联动控制分系统,利用雷达图像,值班人员可迅速直观的看到现场的实际情况。
1.1.4.4 报警处理
报警处理功能模块接收来自前端探测主机的报警事件;同时实现对第三方数据进行融合处理,成为报警数据的底层支持平台。报警处理主机利用分布在围界不同位置的多种传感器信息进行联合分析,实现空间域的融合;同时利用感知信息的时间关系,建立时间域的融合;真正实现一个会记忆,会思考的感知网络,并利用后台强大的数据融合分析系统,进而实现全网级的融合感知与探测提高了整个系统的稳定性和可靠性。
1.1.4.5 网络管理
网管部分可实现现场设备的统一配置,即添加、删除和修改设备配置信息,并与现场设备配置信息保持同步;用户可远程操作现场设备,包括启动、停止、复位等业务操作。