现代战争环境的复杂性导致了对战场侦察的危险系数越来越高,为了降低人员及装备的消耗、安全高效地执行任务、减少作战成本,使用无人机长时间对敌方目标进行侦察、突袭、攻击等任务已成为有效的作战手段。但单无人机在巡航侦察时间有限、携带传感器种类有限、执行任务范围有限、战场环境复杂及自身故障或被击落等原因,无法保证完成战场所需的所有任务。因此,多无人机协同作战可更好的实现对敌战场的情报搜集与打击等任务,从而提高地面指挥人员对战场信息的认知与分析能力,提升作战效能。
基于未尔科技自主研发的VRAD SensorXpert传感器仿真平台打造的“多无人机传感器仿真系统”,可实现多无人机的全方位、全天候、全天时、多波段、多场景和多任务的协同作战仿真与训练。
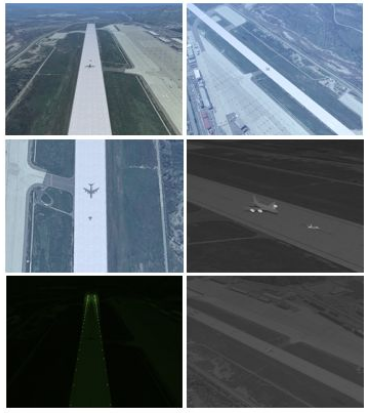
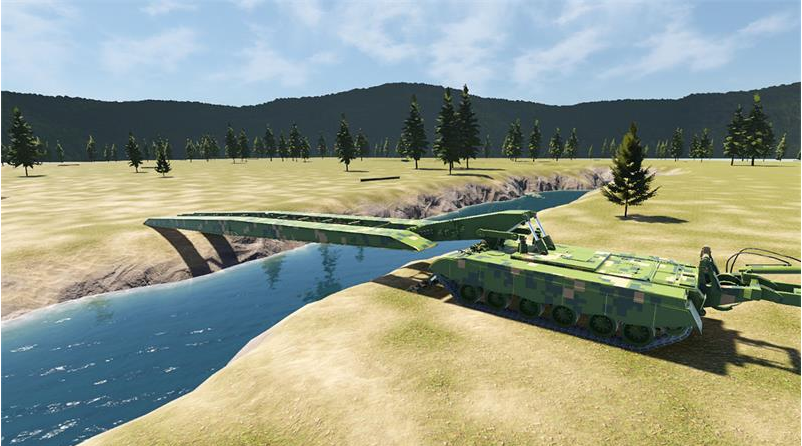
图1 多无人机多视角成像
多无人机传感器仿真系统可实现如下主要功能:
(一)多无人机协同侦察任务规划及数据传输
针对敌方目标所在位置和天气环境等因素的不同,用户可合理配置无人机数量、携带传感器类型和无人机飞行路径。界面支持配置各无人机传感器的参数、目标点气象环境参数和运动轨迹路线,同时可通过网络实时接收用户仿真系统生成的无人机轨迹和传感器参数,实现无人机对目标区域的全方位侦察。
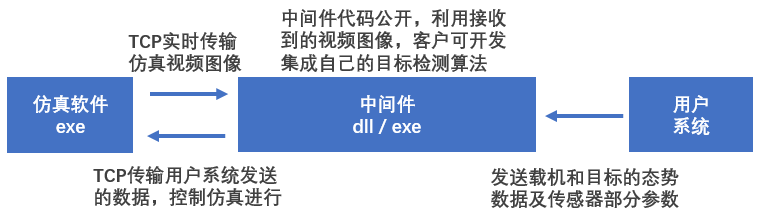
图2 基于中间件的网络传输方式
除上图所示方式外,还可通过FC光纤、反射内存网、串口及总线方式传输有效的控制指令,且中间件的开放利于用户进行传输接口的拓展。
(二)多波段多场景图像生成及传输
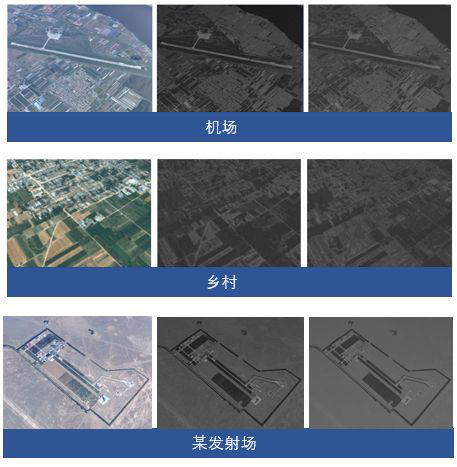
针对不同的作战场景和大气环境,构建多种三维背景环境,如机场、丘陵、乡村等,并提供有效的传感器成像手段,仿真波段覆盖可见光(黑白或彩色)、微光夜视、中波红外和长波红外等。
图3 不同作战场景成像
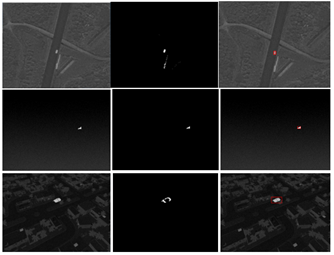
(三)侦察目标检测定位
为精准的使无人机实行打击任务或指引导弹末制导,系统提供经典的目标检测等算法,可通过无人机和传感器姿态信息解算目标地理坐标与屏幕坐标,获取米级精度的目标及侦察区域的定位功能。
图4 目标检测
图5 目标检测定位
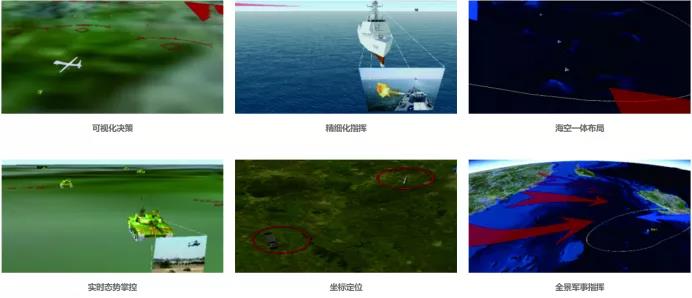
除上述功能外,多无人机传感器仿真系统还能够在无人机飞行路径规划、飞行侦察辅助显示、多源图像融合与质量评估、对地/海/空的目标检测与识别算法研究等方面提供支撑,且支持半实物接口仿真和图像数据库构建等功能。
多无人机协同体系是一种新兴且复杂的作战模式,为使这项技术更科学成熟,须综合运用大量的先进模拟与仿真技术为研究打牢基础,同时还需理论研究与试验验证为实际战场应用提供保障。未尔科技以VRAD SensorXpert传感器仿真平台为基础打造的“多无人机传感器仿真系统”,可有效提升多无人机的全方位、全天候、全天时、多波段、多场景和多任务的协同作战仿真与训练能力,强化地面指挥人员对战场信息的认知与分析,不断提升作战的综合效能。