2022-09-06 10:35:00
来源:硕博科技
大型的机械装备都面临着训练难度高、危险性强的问题,例如部队装备的某型扫雷车。该型扫雷车主要用于在开辟通路中实现控深、发射、磁扫、通标等动作进行雷场的清除和处理,本身具有一定的危险性。硕博所研发生产的该型扫雷车模拟器能够实现大型设备的室内训练,将训练损耗和训练风险基本降为0,能够取代真实装备的野外训练,满足系统所需要的精度和仿真度,在实际使用过程中取得了良好的效果。

系统的结构与功能原理
该型综扫车模拟器是主要是由计算机、显示系统以及模拟装甲车的驾驶舱形式的仿真操作舱三部分组成。该型扫雷车模拟器的控制装置采用与真实装备相同的操作控制装置和操作平台,驾驶操作平台从外形上与真实装备的驾驶舱、作业舱基本相同。仿真操作平台主要是用于训练对该型扫雷车的操作使用和驾驶训练。控制计算机采集平台实时传输的制信号,经过A/D转换,变为计算机可以利用的数字信号,控制计算机调用仿真程序实时输出场景。
在训练模拟器中,系统的计算机用来采集扫雷控制面板的开关信号输入和驾驶平台的油门、踏板等模拟信号输入,计算机系统用以模拟该型扫雷车的作业装备工作模式,系统建立了土壤类型和吃土深度的阻力系统数学模型,通过判断土壤条件和油门大小的关系,来实时显示扫雷效果。
1、实现该型扫雷车驾驶和操作的全过程,能够按照半实物硬件的操作,实时显示扫雷动作,实现流程步骤按逻辑排序,系统提示警报功能;
2、实时采集驾驶的模拟信号,模拟驾驶过程中的阻力、油门大小等驾驶功能;
3、操作错误数据日志,可自定义考核题库,随机组卷,实现错误操作的监测和报警功能,自动结算考核成绩等。

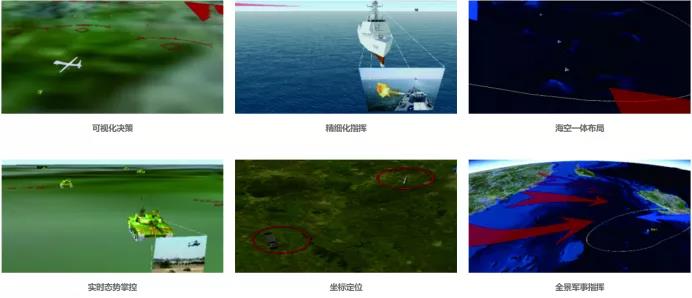
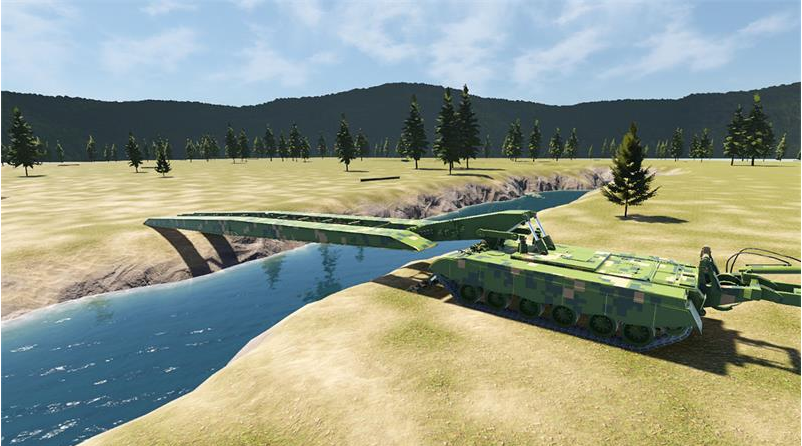
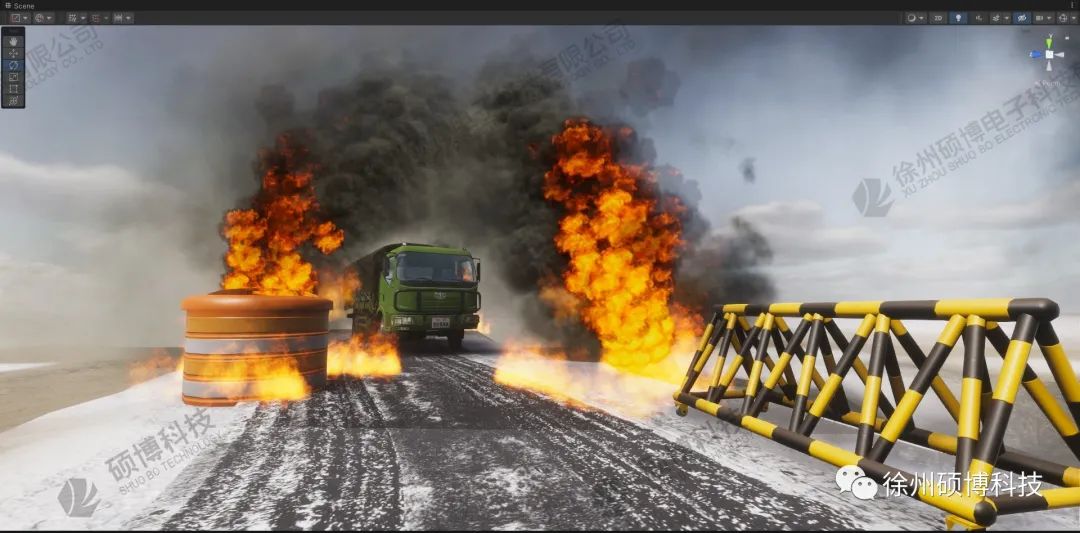
该型综扫车模拟仿真软件三维场景仿真,具有身临其境、交互性强等特点,图形的实时显示使得系统具有临场感、而场景的实时渲染速度也决定了系统的交互性。当操作模拟座舱的对应操控部件后,三维场景中的扫雷车装备同时做出相应的动作和变化,模拟系统具有良好的交互性。仿真模拟训练系统的三维场景主要包括:天气、地形、植被、河流、沟渠、灯光、烟雾、车辙、音效等。三维场景驱动主要涉及三维模型的调用、动作逻辑符合实车性能、视角视距的选择和调节、地形匹配和碰撞反应等技术。
其中土壤模块的仿真是一个比较复杂的过程。犁扫过程中,土壤的表面发生变化,根据对土壤表面特性的分析对土壤表面进行了单元分割,每个土壤单元的特性主要有凸起、凹坑、斜坡等单元。土壤还分为沙土、黄土、粘土、重壤土等4类型土,依据数学模型,对土壤表面各点逐个进行判断,在软件中设定相应的参数,从而得到逼真度很高的虚拟现实场景。