全部
资讯
产品
关注微信
关注微博
新闻头条
军桥杂志
首页
国防信息化
智慧军营
通讯指挥
大屏显控
虚拟仿真
信息安全
AI计算
安防监控
无人机
作训装备
数码物联
军工电子
媒体展会
方案
技术
热门
产品
无人机模拟训练
联合作战
指控中心
智能枪弹柜
智慧军营
野战兵器室
账外机
手机管控
电子沙盘
军事体育训练
智慧训练
数字化营区
无线通信
Mesh自组网
战术训练
虚拟训练
仿真训练
更多
国防信息化
|
军事信息化
|
外军动态
|
协同融合
|
国防热点
首页
>
国防信息化
>
外军动态
> 正文
智能无人系统技术应用与发展趋势
2022-10-31 15:37:58
来源:
随着前沿科技加速应用于军事领域,智能无人系统成为现代战争的重要组成部分,世界主要军事强国均高度重视智能无人系统技术在军事领域的应用,在未来,智能无人系统将深刻影响作战方式,颠覆战争规则。而智能无人系统作为前沿科学技术(如人工智能、智能机器人、智能感知、智能计算等)的集大成者,其代表了一个国家科技实力的最高发展水平。所以,在智能无人系统领域开展研究能极大地推动现有军事、民生领域的发展。
当前,无人系统装备已在军事冲突中崭露头角,例如,在土耳其与叙利亚的冲突中,土耳其利用空军装备的安卡-S型长航时无人机和巴拉克塔TB-2察打一体型无人机,对叙利亚政府军进行了打击;俄罗斯国防部也曾公布叙利亚境内的武装分子利用载有爆炸物的无人机对其军事基地展开了集群式攻击;2020年,美国利用一架MQ-9“收割者”无人机袭击了伊朗高级军事指挥官并使其当场毙命。无人作战正在到来,智能无人系统作为未来战场的关键利器,将决定整个战争的胜利归属。
图片来自网络
发展智能无人系统不仅会推动现有军事科技的升级与进步,还将带动民用科技的智慧性发展,包括智能交通系统、智慧家居系统、智能制造系统与智能医疗系统等。为了更加科学、快速地发展智能无人系统,各科技大国纷纷出台了一系列有关智能无人系统发展的规划与路线,力求在智能无人系统领域的发展中抢得先机,夺取制高点。相关的有美国的自主无人系统综合路线图、俄罗斯的国家武器装备计划、英国的国防创新技术框架、中国的新一代人工智能发展规划以及日本的中长期技术规划等。
近年来,从空中到空间、从陆地到海洋,各种类型的智能无人系统大量涌现,世界各强国已经逐步将智能无人系统部署到军队中,并且在一些地区冲突、反恐战场中,智能无人系统的关键作用日益增加。因此,本文将重点从未来战场的军事需求出发,基于未来战场面临的实际复杂环境的挑战,分析智能无人系统发展与应用所需的关键技术,并从军事角度分析个体增强与集群增强关键技术,阐述智能无人系统的发展趋势。
一、国内外研究现状
智能无人系统概念才提出不久,目前其研究尚处于初级阶段,国际上也未形成统一的定义,暂且将其定义为:由无人平台及若干辅助部分组成,具有感知、交互和学习能力,并且能够基于知识进行自主推理、自主决策,从而达成目标的有机整体。智能无人系统依据其作用的空间范围,可以划分为陆地无人系统、空中无人系统和海洋无人系统三大部分。其中,陆地无人系统主要包括侦察无人车、运输无人车、作战无人车、破障无人车、排爆无人车、无人车编队与指挥系统等;空中无人系统主要包括侦察无人机、作战无人机、后勤运输无人机以及无人机编队等;海洋无人系统主要包括侦察无人艇、作战无人艇、后勤运输无人艇、巡逻搜救无人艇、侦察无人潜航器、作战无人潜航器以及岸基支持系统等。本节将从以上3个部分来对国内外智能无人系统的研究现状进行阐述。
⒈国外智能无人系统研究现状
⑴陆地无人系统
陆地无人系统主要用于情报搜集、侦察巡逻、扫雷除障、火力打击、战场救援、后勤运输、通信中继以及电子干扰等领域,随着陆地无人系统在战斗中的优势愈发凸显,针对其的研究愈发受到各国的广泛关注。
美国曾于1993年11月启动“联合战术无人车”项目,也即“角斗士”无人作战平台项目的前身。2006年,美国完成了“角斗士”无人作战平台全系统的设计,并于2007年正式装备海军陆战队。“角斗士”战术无人作战平台是世界上第1款多用途作战无人平台,搭载的传感器系统有日/夜摄像机、GPS定位系统以及声学与激光搜索系统等,并装备有机枪、冲锋枪、催泪弹、狙击系统、生化武器探测系统等,可以在不同的天气和地形下执行侦察、核生化武器探测、突破障碍、反狙击手、火力打击与直接射击等任务。
“角斗士”无人作战平台搭载有高机动与高生存底盘,针对该平台,还开发了便携式手持控制系统,并围绕该控制系统的抗干扰性、网络互操作性、小型化与操纵简便化等技术问题完成了一系列开发工作。但因“角斗士”无人作战平台的装甲防护能力较弱,执行任务的隐蔽性差,导致其远程侦察与控制系统面临的干扰较多。除此外,美国陆军也服役了一些其他的陆地无人系统,如“蝎子”机器人、“魔爪”机器人等。2017年,美国陆军制定了《机器人与自主系统(RAS)战略》,为开展无人作战能力建设提供了顶层规划。图1所示为美国陆地无人系统。
图1 美国陆地无人系统
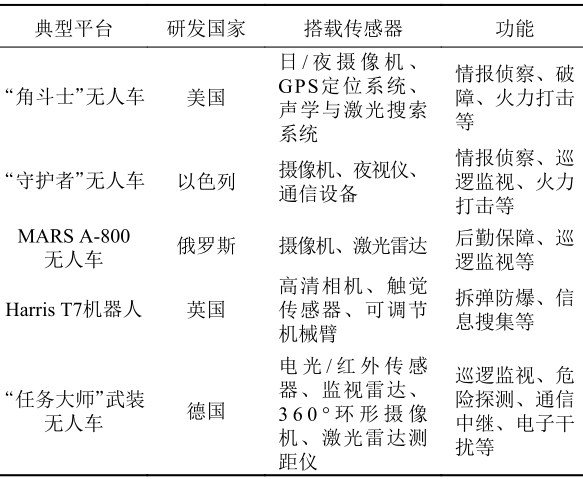
以色列、俄罗斯、英国和德国也相继进行了陆地无人系统的研制工作,并研发出了一系列先进的产品,产品列表如表1所示。例如,以色列研发的“守护者”系列自主无人车可以结合搭载的传感器与融合算法,自主侦察与识别危险障碍,执行巡逻、监视与小规模的火力打击任务;俄罗斯研制的MARSA-800无人车可以执行运输和后勤保障以及跟踪监视等任务,并可以在执行任务的过程中实现自主路径规划,规避障碍,该无人车已在叙利亚战场进行部署。英国和德国对陆地无人系统的研究也开展得较早,英国于上世纪60年代就推出了手推车排爆机器人,后来又推出HarrisT7触觉反馈机器人,用于执行拆弹、排爆等危险任务;德国莱茵金属公司开发的“任务大师”地面武装侦察无人车主要用于执行战术监视、危险物检测、医疗后送、通信中继以及火力支援任务。
表1 各国陆地无人系统
⑵空中无人系统
空中无人系统主要以单个无人机平台和无人机集群为主。无人机由于具有视野开阔、飞行自由、设备搭载性好等优点,被广泛应用于军事领域,并在近年来的军事冲突中起到了极大的作用。空中无人系统的主要功能包括:情报搜集、侦察监视、诱饵靶机、目标跟踪、战术打击与空中救援等。
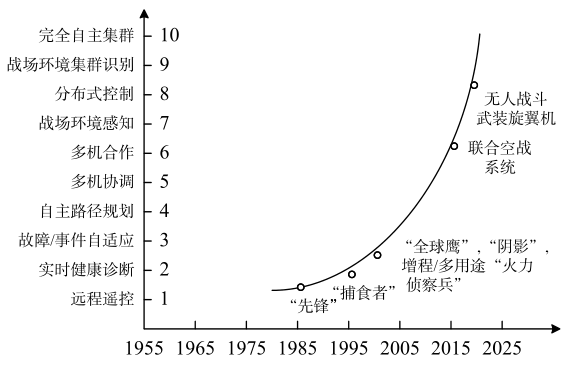
美国空军研究实验室于2000年提出了针对无人机自主作战的概念,并对无人机的自主程度进行了量化定义,制定了发展规划。无人机自主程度量化内容与发展阶段如图2所示。
图2 自主控制水平与无人机自主化趋势
2003年,美国将空军和海军的无人作战飞机系统项目合并,启动了“联合无人作战系统”(J-UCAS)项目,开始了对无人作战飞机X-47B的研究。2006年,美海军提出了“海军无人作战航空系统”(N-UCAS)项目,旨在为航母舰载机联队引入无人作战飞机,并继续对X-47B开展研究。在2012—2014年间,又多次完成了航母弹射、着舰、触舰复飞等试验,并于2015年完成了自主空中加油试验。X-47B攻击型无人机是一款可以自主操纵、隐身性能好且适用于陆基和舰载的无人作战飞机,具备高航程和高航时的特点,装备有照射雷达、光电制导系统和孔径雷达等先进的传感器,主要功能包括情报侦察、目标追踪、电子战干扰、火力打击等。美国研制的其他空中无人系统,如“全球鹰”、“捕食者”、“猎人”和“大乌鸦”等也已在军队服役,如图3所示。
以色列研制的“哈比”无人机配备有反雷达感应器、光电制导系统和导弹,可自主攻击敌方雷达系统,如图3所示。
图3 各国空中无人系统
单个空中无人系统在执行任务时容易被干扰和打击从而导致任务失败,而空中无人系统集群则可以弥补这一缺陷,更大程度地发挥空中无人系统的优势。美国国防先进研究计划局(DARPA)针对空中无人系统集群先后启动了“小精灵”低成本无人机项目、低成本无人机集群项目、“山鹑”(Perdix)微型无人机机载高速发射演示项目、进攻性蜂群使能战术(OFFSET)项目等,通过开发和测试用于无人系统集群的体系架构、通信系统以及分布式控制算法,发展了无人机集群自主控制系统,并利用人工智能、态势感知、虚拟现实及增强现实等前沿科学技术,提升了空中无人系统集群在战场上的综合作战能力。
⑶海洋无人系统
海洋无人系统包括水面无人系统和水下无人系统2类。其中,水面无人系统主要指水面无人艇(以下简称“无人艇”),主要用于执行海上搜救、侦察监视、火力打击、巡逻安防、电子干扰、后勤保障和诱饵靶船等任务;水下无人系统主要指无人潜航器,与载人潜艇相比,其具有无人员伤亡、高隐蔽性与高自主性等优点,主要用于执行情报搜集、目标监测、战力威慑火力打击等任务。2018年,美海军发布了《海军部无人系统战略路线图》,2019年,又发布了《海军人工智能框架》,为海军作战与海洋无人系统的发展提供了路线规划与指南。
在水面无人系统方面,美国提出了“美国先进概念技术演示项目”(ACTD),其重要任务之一便是开展“斯巴达侦察兵”无人艇的研究。该项目已于2007年完成,并在伊拉克战区进行了试验。“斯巴达侦察兵”无人艇搭载有无人驾驶系统与视距/超视距通信系统,并搭载有电光/红外搜索转塔、高清摄像机、导航雷达、水面搜索雷达、全球定位系统接收机等先进传感器,以及舰炮、反舰导弹及反潜感应器等武器,主要用于执行情报搜集、目标监视、信息侦察、反水雷和海上安防等任务,具有一定的自主能力。美国研制的“海上猎人”无人艇搭载有声呐与光电传感器,以及近距、远程雷达探测系统与可扩展模块化声呐系统,主要用于执行识别、监测可疑目标,引导火力打击等任务。美国海洋无人系统如图4所示。以色列研制的“保护者”无人艇主要用于执行情报侦察、可疑目标辨别、战术拦截、电子干扰和精确打击等任务(图4)。俄罗斯研制的无人水面侦察艇可以在母舰的指挥下执行快速巡逻任务并检查、监视指定区域,搜寻情报。
图4 各国海洋无人系统
在水下无人系统方面,俄罗斯研制的核动力无人潜航器“波塞冬”,可携带常规以及核弹头,执行侦察与战略核打击任务,如图4所示。美国研制的“刀鱼”无人潜航器,可以通过发出低频电磁波来扫描可疑物体,搜寻情报;研制的“金枪鱼”-9无人潜航器可携带多种标准载荷,可用来执行近海勘探、反水雷、监视和侦察(ISR)等任务。
⒉国内智能无人系统研究现状
近年来,我国军用智能无人系统发展迅速,本文将从陆地无人系统、空中无人系统和海洋无人系统3个方面进行阐述。
在陆地无人系统方面,国防科技大学与三一重工股份有限公司联合开发了“沙漠苍狼”陆地无人轻型平台,其以履带为动力,搭载榴弹发射器和机枪等武器系统,可以用来执行后勤运输、伤员运送、侦察监测、火力打击等任务。山河智能集团研制的“龙马”系列无人车,具有强大的运输与越障能力。南京理工大学研制的“神行-III”军用地面智能机器人系统,具有较强的自主导航与情报侦察能力。国防科技大学与哈尔滨工业大学等单位联合研制的无人驾驶核化侦察车,具有较高的机动能力与装甲防护能力,搭载的武器系统可以执行火力打击并具备一定的自主能力。
在空中无人系统方面,成都飞机工业集团研制的“翼龙”系列无人机具有全自主水平起降能力、巡航飞行能力、空地协同能力与地面接力控制能力等,搭载有多型光电/电子侦察设备以及小型空地精确打击武器,可以执行情报侦察、目标跟踪、火力打击等任务。我国研制的“彩虹”系列无人机具有中空长航时的航行能力,可以搭载电子干扰系统与多种武器系统,能执行火力打击、情报侦察、通信干扰、电波干扰等任务;研制的攻击11型无人机具有极强的隐身能力,可以搭载精确的制导导弹,用于执行对地攻击任务。我国空中无人系统如图5所示。
图5 我国空中无人系统
在海洋无人系统的水面无人系统方面,由哈尔滨工程大学牵头研制的“天行一号”无人艇,采用油电混合动力,最高航速超过92.6km/h,最大航程1000km,为目前世界上最快的无人艇。该艇融合了自主感知、智能控制、自主决策等技术,可以实现对周围复杂环境的快速态势信息认知与危险规避,可以用于执行气象信息监测、地貌测绘、警戒巡逻、情报侦察、火力攻击等任务。由上海大学研制的“精海”系列无人艇具有半自主与全自主的作业能力,可以执行目标侦察、海洋测绘、水质检测等任务。由上海海事大学研制的“海腾01”号智能高速无人艇,搭载有毫米波雷达、激光雷达、前视声呐等传感器,可以执行可疑目标监视、水下测量、海上搜救等任务,具备全自主与半自主航行能力。江苏自动化研究所研发的JARI智能无人作战艇,搭载有光电探测器、四面相控阵等探测设备,同时,还搭载有导弹鱼雷等武器系统,可以执行情报搜集、敌情侦察、精准火力打击等任务。由珠海云洲智能科技有限公司等单位联合研制的“瞭望者Ⅱ”无人导弹艇,搭载有全自主无人驾驶系统及导弹等武器,可以执行敌情侦察、情报搜集、精准火力打击等任务。我国海洋无人系统如图6所示。
图6 我国海洋无人系统
在海洋无人系统的水下无人系统方面,西北工业大学研制的“魔鬼鱼”无人潜航器为仿生蝠鲼无人潜水器,已完成了1025m的深海测试。哈尔滨工程大学研制的“悟空”号全海深无人潜航器,成功完成了10896m的深潜和自主作业试验。我国研制的“潜龙一号”、“海马”号等深海潜水器均已成功完成深海探测任务。
⒊技术现状总结
目前,智能无人系统已逐步应用于军事应用的各个领域,且随着前沿科学技术的发展,智能无人系统在军事领域的应用将日益增多。但在智能无人系统的使用方面,尚未完全实现自主化与智能化。当前,智能无人系统技术在军事领域的应用现状主要分为以下3个部分:
①从作战任务的角度:作战任务从执行简单的侦察监视向主流对抗作战方向发展;战场对抗由人人对抗向人机对抗,再向机机对抗方式转变;应用环境由结构化环境、实验室环境向真实战场环境转变,并在未来逐步发展成真实环境与虚拟现实相结合的增强现实环境。
②从指挥控制的角度:控制方式从单机简单遥控、程控方式向人机智能融合交互控制方向发展,不过尚未完全实现自主控制;体系结构由专用化、单一化向通用化、标准化、互操作性方向发展。
③从感知决策的角度:决策方式由单一依靠人来决策向以人为主,人机智能交互决策为辅的方式转变;感知方式由单一依靠传感器获取特征信息,由人来判断目标属性向基于人工智能的目标识别、特征信息获取的方式转变。
二、智能无人系统关键技术
智能无人系统作为多学科领域的集大成者,涉及的技术众多,执行的任务多样,且应用场景复杂多变。例如,空中环境多雨、多雾,能见度低,有大风、光照干扰等;陆地环境地形复杂,有障碍物遮挡干扰和危险污染区域等;海上环境有风浪干扰、船舶摇摆、目标不显著、海岸线不规则等。不同的环境及用途给智能无人系统技术研究和性能的发挥提出了巨大挑战。为适应受限的多变环境,可将智能无人系统关键技术归纳为复杂环境下自主感知与理解技术、多场景自主技能学习与智能控制技术、多任务集群协同技术、人机交互与人机融合技术、决策规划技术与导航定位技术,本节将主要以海洋无人系统为案例对智能无人系统关键技术进行详细阐述。
⒈复杂环境下自主感知与理解技术
在复杂环境下对环境进行自主感知与场景理解是智能无人系统能够自主作业并形成作战能力的前提,将直接影响任务能否成功完成。针对实际环境的复杂多变,尤其是海面环境的风浪干扰及船舶摇晃等困难,智能无人系统需要完成目标自主选择感知,获取多模态信息,并对信息抽象完整理解等目标。因此,复杂环境下的智能无人系统环境自主感知与理解技术需突破多模态传感器融合自主感知技术,以及复杂场景目标识别与理解技术。
⑴多模态传感融合自主感知技术
目前,智能无人系统搭载的信息获取传感器主要包括导航雷达、毫米波雷达、激光雷达、光电载荷等。单一传感器无法直接获取高精度、稠密的场景三维信息,需研究多传感器融合的环境自主感知技术,从而为场景理解提供支撑。多传感器融合是将各种传感器进行多层次、多空间的信息互补和优化组合处理,最终产生对观测环境的一致性解释。在此过程中,要充分利用多源数据进行合理的支配与使用,而信息融合的最终目标则是基于各传感器获得的分离观测信息,通过对信息多级别、多方面组合导出更多有用的信息。通过利用多个传感器相互协同操作的优势,综合处理所有信息源的数据,从而提高整个传感器系统的智能化。海洋自然环境相比陆地与空中环境更为复杂,面临船舶的剧烈摇摆、风浪干扰、光照不均、目标不显著等特殊的挑战,海洋智能无人系统需要依据每种传感器的独特属性来对指定目标进行多传感器信息融合处理,然后结合无人系统内部导航单元与岸基支持系统的电子海图信息,构建海面环境多维立体态势图,执行对指定目标的跟踪、检测、识别与认知任务,最终实现海洋智能无人系统对海面环境的自主感知与完整理解。
⑵复杂场景目标识别与理解技术
智能无人系统具备作业自主性的关键在于能有效理解场景与目标信息,而准确理解场景信息主要包括目标语义信息构建与场景文本信息描述。相比陆地与空中环境,海洋自然环境面临风浪干扰、船体剧烈摇摆等独特的困难,这为智能无人系统完整地理解环境信息与准确识别指定目标带来了挑战。利用智能无人系统搭载的激光雷达与高清摄像机等传感器,可以获得海洋环境场景的原始点云信息及图像特征信息,利用基于点云、点云与图像融合的三维目标检测方法与三维场景语义分割方法等,可以实现智能无人系统对场景信息的完整认知及对指定目标的准确识别。
基于点云的方法主要包括2种:基于网格或者体素的方法,以及基于点的方法。基于网格或体素的方法是利用体素或者鸟瞰图来将获取的海面不规则的点云转换成规则的表征方式,然后提取点云特征。基于点的方法则是直接在获取的海面原始点云中提取目标特征。基于点云与图像融合的三维目标检测方法,是将激光雷达获得的海面场景中目标的精确坐标与海面图像提供的环境纹理和颜色信息相结合,这样更加有助于智能无人系统对海洋场景目标的精确识别与准确、完整的理解。
⒉行为决策与轨迹规划技术
在实际的、复杂的战争场景中,对于智能无人系统面临的复杂任务环境与多重任务,必须突破多源异构环境下的行为决策技术、动/静环境下的轨迹规划技术与复杂场景下的轨迹跟踪技术。
⑴多源异构环境下的行为决策技术
行为决策是智能无人系统实现自主控制的关键。在无人艇不同速度、不同相对距离、不同数据类型的复杂环境下,需要准确提取有效信息来为无人艇下一时刻的决策做出安全可靠的控制指令。首先,提取出具有代表性的环境特征信息,建立足够数量与精确标定的学习数据集;然后,构建基于深度神经网络的决策器,并利用建立的数据库进行学习;最后,利用机器学习算法对构建的决策器进行优化,进一步提高决策精度。
⑵动/静环境下的轨迹规划技术
轨迹变换是无人艇与无人潜航器最基本的行为。在复杂的战场环境下,根据不同的环境状况规划出一条可行、可靠的轨迹是无人艇与无人潜航器实现智能行驶的关键。该技术主要包括基于多项式的轨迹规划技术、基于多目标约束的轨迹规划技术与基于正、反梯形侧向加速度的轨迹规划技术。
⑶复杂场景下的轨迹跟踪技术
对规划出的理想轨迹进行跟踪是无人艇与无人潜航器的重要任务,其关键在于解决无人艇或无人潜航器进行目标轨迹跟踪时的高精度与高稳定性控制难题。主要解决方法为:根据无人艇与无人潜航器的运动学与动力学模型,输出对应的执行器控制量来实现对指定目标的实时、准确跟随,在保证跟踪精度的前提下,实现无人艇与无人潜航器的自主智能转向与各个驱动模块多执行器之间的协调控制。
⒊自主导航定位技术
导航定位系统是智能无人系统的关键组成部分,其可以提供精准、可靠的有关无人艇或无人潜航器的速度与位置等信息。导航系统一般由陀螺仪、加速计、卫星接收器等组成,部分辅以视觉模块,或是基于实际复杂的环境情况搭载先验空间位置图与物理信息传感器等。智能无人系统要实现任务的精准执行,必须突破基于惯性/卫星深度信息融合导航定位技术、基于惯性/天文信息融合导航定位技术、基于视觉跟踪的导航技术与地球物理辅助导航技术。
⑴基于惯性/卫星深度信息融合的导航定位技术
该技术是将无人艇的惯性信息引入卫星载波/码环路,然后利用全自主、短时、高精度的惯性信息辅助卫星接收机信号的更新,从而实现无人艇的惯性导航与卫星导航的优势互补及最优融合。
⑵基于惯性/天文信息融合的导航定位技术
基于天文的导航系统具有高自主性与不易受干扰的优势,通过利用天文导航输出的信息与初始位置提供的信息,可以推算出无人艇的位置。将惯性导航信息与天文导航信息相融合,可以提高天文导航定位的鲁棒性。基于天文导航辅助的惯性/天文组合定位技术已成为无人系统自主导航领域的关键部分。
⑶基于视觉跟踪的导航技术
由于实际战场环境的复杂性,无人艇会处于复杂的工作环境中,容易受到外界干扰而出现GPS拒止的情况,从而使导航系统无法处于组合状态。单独的惯性导航系统精度较低,容易积累误差,长时间的纯惯性导航会使无人艇失去执行任务的能力。而基于视觉的方法却没有时间的误差积累,只需提取到高清相机所获得图像的关键特征,即可通过视觉算法与先验知识获得无人艇与无人潜航器的位置信息。基于视觉的导航算法不易受到干扰,鲁棒性较强,且能弥补在GPS拒止环境下由纯惯性导航带来的误差积累,被广泛应用。
⑷地球物理辅助导航技术
由于海洋独特的环境,无人潜航器需长时间在水下航行,导致无法获取实时、准确的卫星信号与天文信息。另外,由于水下光照弱等问题,基于视觉的导航方法也受到限制。因此,通过获得海洋内部的先验空间位置图,并利用无人潜航器搭载的物理传感器获取的实地场景信息并进行匹配,可以实现无人潜航器的高精度自主导航。
可以利用勘测的海洋固有的地球物理属性的时空分布特征,来制作地球物理导航空间位置图,通过将无人潜航器所搭载的物理属性传感器实地获取的物理特征信息与预先搭载的空间位置图相匹配,可以获得无人潜航器的高精度定位,实现无人潜航器的高精度自主导航。
⒋多场景自主技能学习与智能控制技术
多场景智能控制技术是智能无人系统解决复杂、多变和控制对象不稳定等问题的关键技术,是智能无人系统适应复杂任务需求的有效工具。在复杂的海洋环境下,智能无人系统要完成实时、准确的区域监控、目标跟踪、信息获取与精准打击,就必须突破任务的自主技能学习技术、自主作业交互控制技术,以及类人智能控制的无人系统运动控制技术。
⑴任务的自主技能学习技术
自主技能学习是指在无人系统与外界交互的过程中,基于先验知识或规则进行学习以完成任务的过程。无人系统作业技能的自主学习本质是模拟人学习认知的部分过程。智能无人系统利用基于深度强化学习的技术,将深度学习的感知能力与强化学习的决策能力相结合,可实现在海面复杂环境下从高纬度的原始数据信息输入到决策输出的直接控制。智能无人系统自主技能学习主要包括3个方面:一是对海洋表面与海洋内部的复杂环境进行描述,并获得周围环境的初始状态数据信息;二是基于智能无人系统与海洋表面和内部复杂环境的描述方式,进行深度强化学习的数学建模,获得自主技能学习过程的状态价值函数与控制策略函数等关键信息;三是利用智能无人系统与海洋表面和内部复杂环境交互所获得的数据信息,对状态价值函数及控制策略函数进行更新,以使海洋智能无人系统学习出更优的控制策略。
⑵自主作业交互控制技术
智能无人系统在任务的自主学习与控制过程中,需要与海洋表面和内部复杂环境接触形成良好的耦合系统,以保证对海洋表面与内部复杂环境信息的实时、准确获取,并正确、快速进行无人艇、无人潜航器的航行规划、自主航行控制与自主规避碰撞等。智能无人系统自主作业交互控制技术的任务主要包括:智能无人系统交互规则与控制策略的设计;海洋表面与内部复杂环境的建模方法;无人艇、无人潜航器与作业对象的动力学在线建模及修正;海洋表面与内部复杂环境中虚拟力约束的动态生成及共享控制方法。
⑶类人智能控制的无人系统运动控制技术
类人智能控制的无人系统运动控制技术是将人工智能与传统控制方法相结合,以解决在实际复杂的海洋战场环境下,无人艇与无人潜航器的稳定精确控制问题,主要包括无人系统智能控制算法的设计与无人系统智能控制策略的设计2个方面。无人系统智能控制算法设计主要包括:分层的信息处理和决策机构;在线的特征辨识与特征记忆;开/闭环控制、正/负反馈控制以及定性决策与定量控制相结合的多模态控制;启发式直觉推理逻辑的运用。无人系统智能控制策略设计则是设计合理的无人艇或是无人潜航器的方案,以满足实际的任务需求。
⒌无人集群协同控制技术
在实际的作战场景中,由于战场环境的复杂性与任务的多样性,单艘无人艇或是无人潜航器通常都无法满足实际任务的需求。单艘无人艇或无人潜航器搭载的设备数量有限,感知视角与区域范围不够全面,导致在执行完整的情报探测、目标跟踪、战场环境感知与全面火力打击任务时不够精确与彻底,因此,由多艘无人艇与无人潜航器组成的智能无人系统集群协同执行任务就成为必然的趋势。要完成对智能无人系统集群的控制,需要突破智能无人系统集群局部规则控制技术、智能无人系统集群软控制技术、智能无人系统集群领航控制技术以及智能无人系统人工势场控制技术。
⑴智能无人系统集群局部规则控制技术
基于局部规则的控制技术是智能无人系统针对无人艇、无人潜航器集群控制的基本方法,主要在于对无人艇、无人潜航器集群内部个体局部控制规则的指定。局部规则控制技术在一定程度上实现了对海洋无人系统集群的智能控制,但是对于海洋无人系统集群行为与集群模型之间的参数,需要进行大量的实验来获得,并且对参数的取值也非常敏感。所以,要实现对智能无人系统完全的智能控制,还需辅助以其他技术。
⑵智能无人系统集群软控制技术
智能无人系统集群的软控制技术主要基于2点需求:一是在智能无人系统集群中,个体之间的控制规则很重要,例如每艘无人艇、无人潜航器的控制与内部作用是整个海洋智能无人系统集群出现群体行为的必要条件;二是智能无人系统集群采用的是局部通信策略,随着集群系统内无人艇、无人潜航器的增加,不会影响到整个智能无人系统集群的状态。
软控制方法是在不破坏智能无人系统集群内部无人艇、无人潜航器个体规则的前提下,加入一个或多个新的无人艇或是无人潜航器,这些无人艇或无人潜航器按照同样的局部规则来参与整个智能无人系统集群的行动,但本身可控,可以接收外部指令。在接收指令后,这些无人艇或无人潜航器将独立完成相应的任务。智能无人系统集群的软控制方法是在无人系统局部控制规则的基础上,加入一个可以控制的无人艇与无人潜航器,使其对整个无人系统集群产生影响,最终完成对整个智能无人系统群体的控制。
⑶智能无人系统集群领航控制技术
智能无人系统集群领航控制技术的基本内容是:在整个海洋智能无人系统集群个体保持局部规则的前提下,令集群中少数无人艇与无人潜航器拥有更多的信息量和更强的信息处理能力,并与其他无人艇和无人潜航器通过局部信息交互来起到领导者的作用,从而达到控制整个智能无人系统集群的目的。
⑷智能无人系统人工势场控制技术
在智能无人系统集群控制中,只基于局部规则的控制技术难以完成对战场准确、实时的感知,以及对情报信息的搜集获取、对可疑目标的跟踪识别和对敌方区域的精准打击。人工势场控制技术是将物理学中的势能场概念引入智能无人系统集群的控制中,利用势函数来模拟影响单艘无人艇或无人潜航器的内、外作用,而系统集群中的单艘无人艇或无人潜航器则在势函数的作用下行动,最终通过势函数实现对整个智能无人系统的控制。
⒍自然人机交互技术
在实际的战场环境中,智能无人系统面临着操作任务复杂、操作智能化水平低、训练风险大且成本高、设备使用与维修效率低等问题,在这种情况下,就需要提高智能无人系统设备的可操控性与智能化,需要突破智能无人系统人机交互技术、智能无人系统增强现实与混合现实技术以及智能无人系统脑机接口技术。
⑴智能无人系统人机交互技术
智能无人系统人机交互技术是指指挥平台通过图像和语音传感器获取指战员的图像与语音信息,然后利用图像分割、边缘检测、图像识别等算法提取出指战员的手势与眼势等关键信息,随后利用基于深度学习的算法获得指战员的语音信息并传递给指挥平台,从而将指战员的指令下发给下级作战单位。智能无人系统的人机交互技术可以提高任务操作的智能化以及操作过程的容错率与鲁棒性,从而使指战员的指令能够更加稳定、有效地下发给作战单位。
⑵智能无人系统增强现实与混合现实技术
智能无人系统增强现实技术是将计算机生成的图像叠加在真实的复杂作战环境中,智能无人系统混合现实技术则是通过在实际作战场景中呈现虚拟场景的信息,在真实的作战环境下在虚拟世界与指战员之间搭起一个交互反馈的信息回路,从而增加指战员对作战环境体验的真实感。智能无人系统虚拟现实与增强现实作为沉浸式人机交互技术的重要发展方向,已有多种不同的真实作战应用场景,可以有效降低训练时的成本与风险,提高作战时设备的使用与维修效率。
⑶智能无人系统脑机接口技术
脑机接口的主要功能是捕捉人脑在进行思维活动时产生的一系列脑电波信号。在实际作战环境中,智能无人系统脑机接口技术通过对指战员的脑电波信号进行特征提取、功能分类,从而辨别出指战员的意图而做出相应的决策,以此应对复杂的作战任务与突发情况。智能无人系统脑机接口技术可以增强指战员的认知与决策能力,大幅提升脑机交互与脑控技术,赋予指战员在借助思维的同时具有能操控多艘无人艇与无人潜航器等无人作战设备的能力。
三、智能无人系统未来的发展趋势
智能无人系统由于其无人化、自主性、智能性等优点,将出现在未来战场的各个角落,而随着其承担战场任务的增多,将会参与不同的战争场景,导致智能无人系统将面临多项关键性的难题,使其发展受到制约。智能无人系统面临的关键性难题主要有:
①环境高度复杂。智能无人系统具体的应用环境将面临越来越多的要素,非结构化环境下遮蔽物众多、感知视点及范围受限等对智能无人系统的环境感知能力提出了更高的要求。
②博弈高对抗。智能无人系统的战场博弈是取得战场优势的重要手段,作战双方激烈的机动对抗,以及因敌方和战场环境带来的诸多干扰对智能无人系统的机动决策能力提出了新的挑战。
③响应高实时。在未来战场中,作战态势变化剧烈,交战方式将更加灵活多变,需及时应对战场突发事件,这就对智能无人系统的实时响应能力提出了新的要求。
④信息不完整。在未来战场中,受战场环境的限制以及敌方干扰的存在,智能无人系统的信息获取能力将会受到制约,从而造成态势感知不完备、战场态势信息数据丢失与衰减,导致无法完整获取敌我双方的信息。
⑤边界不确定。智能无人系统的无人作战方式颠覆了传统作战模式,未来无人作战的陆海空天一体化,以及通过与社会高度交融带来的社会舆情,都将对智能无人系统的无人作战产生影响,从而造成作战边界的不确定性。
基于以上将会面临的各种难题,未来智能无人系统的发展将集中在个体能力增强与集群能力增强2个方面。个体能力增强主要体现在个体认知智能、个体自主作业与算法芯片化等方面;集群能力增强则主要体现在通过通用化架构提升互操作性,以及跨域协同作战、网络安全与人机混合智能等方面。
⒈认知智能适应复杂任务环境
为提高智能无人系统在高度复杂环境下的适应能力,需要增强智能无人系统的个体认知智能。个体认知智能增强主要体现在从个体感知智能向认知智能的转变方面,综合获取的多源传感信息使得智能无人系统具备人类的语义理解、联想推理、判断分析、决策规划、情感理解等能力。智能无人系统个体认知智能的发展将以脑科学和仿生学等为基础,通过结合知识图谱、人工智能、知识推理、决策智能等技术来实现获取信息的智能理解与准确运用,从而提升智能无人系统对突发事件的高实时响应能力。
⒉自主作业提升单机任务能力
为解决智能无人系统在高度复杂环境下面临的高度复杂任务的难题,需要提高单机的自主作业能力。包括开发基于深度强化学习的决策方法、基于视觉及其他传感器多源信息的自主环境感知与交互方法、基于神经动力学的机器人自主运动规划方法,以及基于人工智能的自主作业方法等,以提升智能无人系统个体的自主环境建模与定位能力、自主决策能力、自主规划能力及自主控制能力,使智能无人系统能够适应复杂的环境并开展自主作业任务。
⒊算法芯片化实现高实时响应
智能无人系统面临的复杂环境对算法、算力提出了较高要求,需要能实时加速计算,实现对战场突发事件的高实时响应。为解决此问题,需要提高智能无人系统个体算法的芯片化水平,即开发新型架构的存算一体芯片,以提高芯片的算力与算法芯片化水平。可研究基于人工神经技术的新型芯片,通过改变数字芯片的二进制计算方式,交换梯度信号或权重信号来使芯片以模拟神经元的方式进行工作,模拟大脑有效处理大数据量的并行计算流,获得超级计算机的并行计算能力,从而极大地提升芯片的算力与算法芯片化水平,解决智能无人系统的高实时响应难题。
⒋通用化的架构提升集群互操作性
为提高智能无人系统面临高度复杂环境的适应能力,以及智能无人系统的维修保障效率,未来智能无人系统将继续发展标准化的指控框架,提高人机协作的智能性并提高系统的模块化程度。主要体现在:
①开发通用式的人工智能框架,支持人与机器之间自主、精确、实时的良好耦合与协作关系;
②提高智能无人系统的模块化与部件互换性,以支持在未来战场中对智能无人系统及其成员进行的快速维修与配置升级;
③提高数据传输一体化水平,以及在未来战场上数据传输的抗干扰能力,降低数据的被截获率。
⒌跨域协同打破集群应用边界
为提高智能无人系统在高度复杂环境下的适应能力,解决作战时的边界不确定难题,需要提高智能无人系统的跨域协同作战能力,以弥补单一作战域能力的不足。可通过智能无人系统的跨域协同作战,将各个组件进行优势互补。即利用空中无人系统的搜索范围大、通信距离远等优点,以及陆地无人系统与海洋无人系统续航时间长、稳定性强等优点,将不同组件的优势进行组合,以增加智能无人系统的多维空间信息感知能力,构成异质多自主体协同系统,从而提高智能无人系统完成复杂任务的能力。
⒍安全网络保障集群可靠应用
智能无人系统在未来战场上面临着信息不完整与博弈高对抗的难题,因此需要提高智能无人系统在高对抗环境下的网络安全保障能力,提高在应对高复杂、高变化任务时的灵活性与面临高强度网络攻击时的稳定性。对抗环境下网络安全保障能力的提升主要体现在以下几个方面:
①规划合理的数据权限,以保证数据的安全性与任务执行的灵活性;
②提高信息保障能力,开发并升级智能无人系统的信息保障产品,备案信息爆炸情况的应对决策;
③增加网络的深度防御能力,统一网络安全的标准与等级,构建网络防御的自主性,提高网络攻击下网络的抗打击能力。
⒎人机混合智能提升对抗能力
为解决在未来战场上面临的高实时响应的难题,提高智能无人系统在高度复杂环境下的适应能力,需要将人类与机器的优点进行结合,构成一种新的人机协作的混合智能方式,即发展智能无人系统的人机混合智能。智能无人系统人机混合智能是一种由人、机、环境系统相互作用的新的物理与生物相结合的智能科学体系。针对智能无人系统在未来战场上面临的高复杂环境与高实时响应的难题,未来人机混合智能的发展主要体现在以下几方面:
①信息智能输入。在获取信息的输入端,将无人系统设备传感器客观采集的信息数据与作战指挥人员的主观感知信息相结合,构成一种多维的信息获取与信息输入方式。
②信息智能融合。获取到多维的数据信息后,通过将计算机的计算数据与作战指挥人员的信息认知相融合,构建一种新的数据理解途径。
③信息智能输出。将数据信息进行融合处理之后,将计算机的计算结果与作战指挥人员的价值决策相互匹配,从而形成有机结合的概率化与规则化的优化判断。
四、结语
智能无人系统由于其自主性、智能性与无人化的特点,在未来战场上将起着日益重要的作用,智能无人系统的发展也将带动智能计算、智能交通、智能制造、智慧医疗、类脑科学等学科领域的发展。今后,应以实际复杂环境战场的任务需求为导向,结合人工智能等前沿学科的先进技术,对智能无人系统进行总体顶层规划;在陆地、空中以及海洋无人系统中不同的无人系统作战平台上,验证可靠的机载智能感知与智能计算设备,并开发可靠、稳定的无人系统自主控制、智能感知、智能决策与智能交互等关键技术,攻克智能无人系统的关键难题,不断提高智能无人系统的自主控制、智能感知与智能决策能力。
关键词:
上一篇:
美国中央司令部瞄准太阳能滑翔机,平流层飞艇以填补持久驻空监视需求
下一篇:
美调整无人机打击政策
相关阅读
热点文章
2024年中国国防费预算公布!
1
推进新时代武警部队军事训练转型发展
2
关于开通军队自行采购平台通知
3
美军空中支援作战及其指挥控制系统
4
“军工三证”系列介绍(三)装备承制单位资格认证
5
体系聚优战作战概念研究之五:信息化战争体系作战怎么打?九大典型作战样式解析
6
美军作战需求?作战概念?作战能力生成与管理流程示意图
7
军民融合政策放大招:军工四证变三证,进一步降低民参军门槛
8
关于《军队军事职业教育条例(试行)》,你想知道的在这里
9
美军综合终端利器旅及旅以下战斗指挥系统(FBCB2)介绍
10
智能无人系统技术应用与发展趋势
外军热点
单兵态势感知技术和装备的主要发展趋势
未来城市作战的前沿技术
美军空中支援作战及其指挥控制系统
美军作战需求?作战概念?作战能力生成与管理流程示意图
美军综合终端利器旅及旅以下战斗指挥系统(FBCB2)介绍
智能无人系统技术应用与发展趋势
联合作战模拟训练系统——美军联合战区级模拟系统(JTLS)发展综述
俄罗斯陆军地面预警雷达装备概览
美军综合终端利器——旅及旅以下战斗指挥系统(FBCB2)介绍
【综述】美军用仿真发展现状与分析
全平台互联:现代联合作战实施的基础条件
美军指挥自动化系统现状与发展趋势
融合热点
“智慧军营”建设潮下的手机管控系统浅析
基于物联网技术的智慧档案室管理系统
关于开通军队自行采购平台通知
军民融合政策放大招:军工四证变三证,进一步降低民参军门槛
军地协同应急管理体系应把握这几点
首届中关村武器装备军民融合创新发展 高峰论坛暨成果展 在北京“蓝海智谷”中关村军民融合无人智能创新基地
学习强国一体机
深入推进军民协同创新 面临的主要问题
专家观点:军民融合的障碍矛盾问题与对策
可视化军事知识图谱系统
民参军的三个军工资质究竟如何申请?
深入实施军民融合发展战略
产品推荐
卫星通信加密系统
网翎便捷式卫星上网机
ZL60P-E 折叠一体化卫星宽带自动便携终端
AB330S便携双极天线 AB230S便携三线天线
融讯RX ESW64专线保障切换器(专业版)
集群快速部署小站系统Rapid