章节概要:
1. 美国Terranaut滨海猎雷机器人
2. 美国用于海洋冰川调查的Icefin UUV
3. 西班牙Sparus II AUV
4. 意大利U-IV UUV
5. 法国NemoSens AUV
01、美国Terranaut滨海猎雷机器人
图1-1 2023年4月10日,美国海军陆战队员在夏威夷进行演习。照片中未出现的Terranaut机器人的设计目的是为了应对这种环境下的爆炸物。
(图片来源:Clayton Baker / US Marines)
(图片来源:Clayton Baker / US Marines)
4月19日,美国鹦鹉螺机器人公司(Nauticus Robotics)宣布,作为一种为国防创新单位(Defense Innovation Unit,DIU)设计、用于摧毁水雷的两栖机器人,Terranaut的初期研发工作已经完成,正进展到下一阶段研发。这台机器建立在Nauticus公司先前的水上无人航行器的基础之上。它符合无缆、自主水下作业的整体图像,为满足特殊的水下军事需求,对商用水下作业工具专门进行了改造。
DIU,即国防创新单位,是国防部下属的一个组织,旨在将商业技术领域的创新转化为军事应用。它不是重新发明轮子,而是着眼于简单地为其战车购买轮子。
Nauticus首席执行官Nicolaus Radford说:“当你有一些商用技术时,DIU就会很感兴趣,他们认为这些技术可以用于国防任务。很多人都关注我们的大型橙色机器人。但机器人两耳之间的东西(译注:意指“大脑”)更重要。”
在Nauticus公司的声明中,他们强调Terranaut是作为一型自主MCM机器人开发的,它可在滨海和泛浪区工作,这些正是海军陆战队训练和计划作战的地方,尤其是在太平洋岛屿战争中。正如所承诺的那样,Terranaut将会游泳和爬行,由一个自主控制系统驱动,该控制系统可通过水声通信接收人工指挥。
Terranaut能用履带行驶,并配有强大的推进器,按计划,它的机械臂可从机体上伸出,处理任何任务,如拆除水雷。
图1-2 Terranaut机器人
(图片来源:Nauticus Robotics)
Radford说:“它能够在水中航行,然后改变浮力,从而获得可观的牵引力。假设你沿海底航行时遇到了一块岩石,你不知道这块岩石有多长,绕过去可能需要一段时间。”这种情况下的解决方案是从上面越过它。
在Terranaut的创造和设计中所获的信息,大部来自于Nauticus公司在Aquanaut上的工作。Aquanaut是一台14.5英尺(4.4米)长的潜水机器人,可在近1万英尺(3 000米)的深度下工作,常规版的工作距离可达75英里(120千米)。它由一台电机驱动,携带超过67千瓦·时电量的电池,水下基线速度为3节,电池可连续使用4天以上。但Aquanaut最与众不同的是它的可伸缩机械臂,在不需要的时候可折叠到体里,而且它像另一台水下机器人一样,无需通过脐带缆直接通信控制即可操作。
图1-3 Aquanaut机器人
(图片来自网络)
Aquanaut可以感知周围环境,这要归功于声呐、立体光学传感器、原始3D点云图像和其它传感器。这些数据能以比在深海传输中更高的分辨率收集,Aquanaut能够浮出水面或停靠对接,更快地传输大容量、高密度数据。
与Aquanaut一样,Terranaut也没有与母艇相连的脐带缆。
Radford说,通常情况下,母艇都有脐带缆与机器人相连,“因为你必须有一个操作员拿着操纵杆、看着高清显示器,才能驾驶这个东西。我们说的是让我们把所有这些都扔掉。我们可以创造一中无需脐带缆的混合机器,它可以游得很远。事实上,人们只是不想仅仅拍照,他们想要拾取、投放、切割、接插某些东西,于是我们开发了一种全新的水下机器,可让你在水下作业而无需脐带缆。”
对于能发射和管理水下机器人的船只而言,取消脐带缆是一种设计上的解脱。但它也带来了一系列新的问题,如:如何确保机器人执行人类操作员要求它完成的任务,现在操作员不是在驾驶而是在指挥机器;由于无线电信号和光信号的作用距离和效力都很有限,特别是在海面以下,所以水下通信十分困难。
解决这些孪生问题意味着应求助于航行器自治和声学控制。
Radford说:“我们的数据传输速率相当于1987年的拨号网络,你不会用Netflix服务器在水下播放高清视频,但有一些方法可将你周围3D环境中的代表性信息发送给操作员,然后操作员指挥机器人的自动驾驶仪。”
这意味着,本质上,机器人本身主要负责管理其压载和方向控制的细节,并执行通过水声传输的指令。作为回应,它将信息发送回去,允许人工选择已经加载到机器人上的动作和行为。
就像之前的Aquanaut一样,Terranaut将预先加载在所处环境中航行和执行被分配的任务所需的行为。一旦Terranaut驶过泛浪区浅滩,进入滨海浅水区和可视范围内,它就会运用这些工具,采用自适应自主控制和远程人工引导方式来拆除致命的障碍物,如水下爆炸物。
译自:www.popsci.com
02、美国用于海洋冰川调查的Icefin UUV
图2-1 海冰下的Icefin
(图片来源:Rob Robbins, USAP Diver)
南极洲西部的斯韦茨(Thwaites)冰川以不稳定著称,它正在破裂和解体,给全球海平面上升带来了坏消息。人们正在努力了解其面积与佛罗里达州几乎相当的思韦茨冰川的几何结构和化学成分,以评估海水变暖和气候变化可能对它产生的影响。
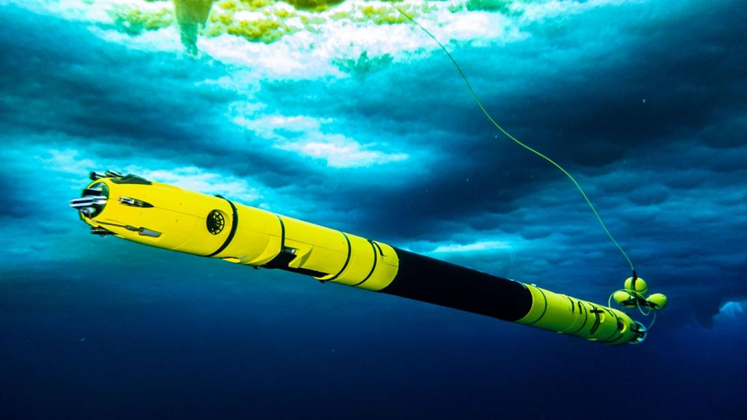
一型名为“冰鳍”(Icefin)的11英尺(3.4米)长的管状水下机器人向我们提供了冰下深处的详细情况,以了解南极洲脆弱的冰架是如何融化的。据本周发表在《自然》(Nature)期刊上的2篇论文,Icefin一直在提供有关冰冻水域下情况的相关细节。
这种类似鱼雷的Icefin机器人最初是在佐治亚理工学院(Georgia Tech)开发的,它的第1个原型可以追溯到2014年。但它后来在康奈尔大学(Cornell University)找到了一个新家。该型机器人能够用它携载的一套传感器来刻画冰下环境。它配备了高清摄像机、光测距系统、声呐、多普勒流速剖面仪、单波束高度计(测量距离),以及测量盐度、温度、溶解氧、pH值和有机物质的仪器。它的活动范围令人印象深刻:它可潜到3 280英尺(1 000米)深处,穿过冰架上狭窄的洞穴。
由于Icefin是模块化的,它可根据任务的需要进行分解、定制和重新组装。研究人员可远程遥控Icefin的航行轨迹,或让它自主航行。
在这片冰冷的水域里,并不只有Icefin。它的旅程是国际思韦茨冰川合作项目(International Thwaites Glacier Collaboration,ITGC)的一部分,该项目中还包括其它雷达、传感器和类似Boaty McBoatface UUV等装备。
2020年,通过在冰上钻一个近2 000英尺(600米)深的钻孔,Icefin冒险越过海洋,到达斯韦茨冰川与阿蒙森海(Amundsen Sea)汇合的临界点,那里的冰开始漂浮。由Icefin收集并经研究人员分析的数据表明,冰川已经从海底向上退却,底部变薄,并迅速向外融化。此外,冰中某些裂缝的形状有助于流入温暖的洋流,使得部分冰川融化的速度比之前预期的要快。
这些新发现虽是不祥之兆,但可用于改进旧的模型,那些模型被用来预测斯韦茨冰川的变化、以及它一旦崩塌后海平面可能上升的速度。
康奈尔大学的研究科学家Peter Washam领导着用于计算融化速度的Icefin数据分析工作,他在一份新闻稿中说:“Icefin正在尽可能靠近冰的地方收集数据,这些地方目前没有其它工具可以到达。这向我们表明,这个海洋系统非常复杂,需要重新思考海洋是如何融冰的,尤其是在像斯韦茨这样的地方。”
在思韦茨之外,你可以看到Icefin在南极洲麦克默多(McMurdo)科考站周围的冰海中监测生态系统,或者帮助天体生物学家了解海洋世界及其生物圈中的生命是如何形成的。
译自:www.popsci.com
03、西班牙Sparus II AUV
西班牙Iqua Robotics公司在FEINDEF 2023国际国防与安全展会上展示了其开创性的Sparus II AUV。
图3-1 在西班牙举行的FEINDEF 2023展会上的Sparus II AUV
(图片来源:Navy Recognition)
Sparus II AUV的出现改变了水下作战领域的游戏规则。凭借其轻量化设计、不同寻常的悬停能力和特定任务的载荷能力,Sparrus II在浅海环境中表现出色,最大深度可达200米。
这型鱼雷外形的AUV将高性能流体力学与无与伦比的机动性无缝结合,彻底改变了水下任务的执行方式。
效率是Sparus II设计理念的核心。它的流线型鱼雷外形优化了流体动力,确保了扩展的自主性和增强的作战续航力。
该型多功能AUV配备了1.9千瓦·时的锂离子电池系统,可连续工作8~10小时,具体取决于具体配置。
Sparus II的关键特征之一是其悬停能力。凭借保持静止位置的能力,它可提供前所未有的控制和机动性,可实现精确数据收集和精细作业。
这一特性,再加上它的轻量化结构,只需两个人就可从任何船上轻松部署AUV,简化了操作流程。
Sparus II采用基于机器人操作系统(Robot Operating System,ROS)的开放式软件架构,允许用户根据他们的特定需求轻松编程和定制任务。
译自:www.navyrecognition.com
04、意大利U-IV UUV
DEFEA是一项著名的全球防务展会,展示了各种防务系统,包括陆海空装备和网络安全系统。在展会期间,意大利马可尼工业服务公司(Marconi Industrial Services)推出了U-IV UUV。
图4-1 U-IV UUV
(图片来源:Navy Recognition)
U-IV长约4米,与21英寸发射管兼容,能在各种环境中轻松运输和部署。
U-IV UUV的模块化设计允许灵活配置和定制平台,以适应特定任务的需求。水密耐压内舱和优化后的外形使水可自由流动,这一关键特点是U-IV具有优良性能的原因之一。
U-IV配备电推进装置和1个主螺旋桨,能够巡航或高速航行,在艏段和艉段装有推进器,用于提高机动性和悬停能力。
U-IV还有2个艏部控制面和1套十字布局艉部稳定鳍和方向舵,以获得最佳控制权和稳定性,以承受外部干扰。
U-IV的最大航速在8~10节范围内,巡航速度为4~6节,可执行各种水下任务,包括侦察、监视和探测水下威胁。
译自:www.navyrecognition.com
05、法国NemoSens AUV
2023年5月9-11日在雅典举行的DEFEA防务展上,总部位于布列塔尼(Brittany)的法国RTSys公司借此机会展示了它的2项产品——NemoSens和SEMA。
图5-1 DEFEA 2023展会上的NemoSens AUV
(图片来源:Navy Recognition)
NemoSens是一型高度通用的AUV,被设计用于一系列科学、工业和国防应用。它的轻量化和模块化设计,加上开放的LINUX体系结构,允许用户开发他们自己的航行算法,以获得更大的灵活性和更充分的应用。
NemoSens的关键特点之一是它的蜂群技术,它使用户能够部署多枚AUVs来扩展任务范围。该航行器与RTsys公司的全系列产品兼容,例如SonaDive蛙人手持系统或信标。
NemoSens拥有来自RTsys产品系列的最新升级版硬件和软件,这使它成为同代产品中最高效、最可靠的微型AUV。软件功能和测量传感器(在2千克限制内)可以根据需要添加,使其能很好地适应不同任务。
NemoSens的航行能力:最大工作深度300米,速度2~8节,续航时间超过10小时。它的尺寸紧凑,长895毫米,直径124毫米,重量小于9千克。
它可以从轻型艇上或岸上发射和回收,在整个任务过程中,它的运动可通过声通信方式进行跟踪。
译自:www.navyrecognition.com