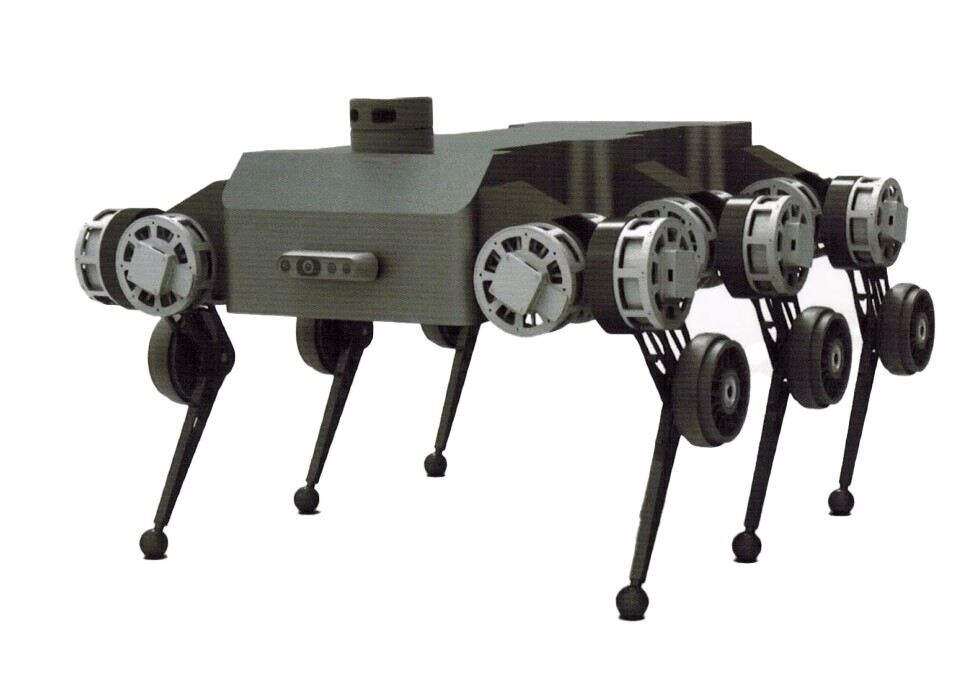
轮腿复合式六足机器人
2023-10-07 16:47:40
来源:军桥网
2013年军博会上某司展示了轮腿复合式六足机器人ARTROBOT-ML,该机器人是由六条三自由度运动腿组成的仿生机器人,可实现平地移动、上下坡、跨越台阶等多种动作,适用于无人作战、抢险救援、巡逻侦察、物资运输、资源勘探等场景,机器人具有六足行走、六轮驱动两种运动模式,足式运动适用于复杂地形的攀爬行走,轮式运动适用于平坦地面快速行驶,轮式/足式运动模式可以进行快速切换。
技术参数
整体尺寸:850×650×550 mm;
主体材质:铝合金表面阳极氧化;
额定负载:≥10 kg;
越障高度: 180 mm;
通讯总线:CAN;
能源供给:锂电池(4BV/30Ah);
控制器:钢铁侠自研高算力低功耗机器人控制器;
操作系统:Ubuntu/ROS;
编程语言:C/C++、Python;
搭载传感器:激光雷达、深度相机、IMU、绝对值编码器等;
轮腿数量:六条运动腿,六个驱动轮;
保护设计:电池过充过放保护、防高温保护、关节堵转保护、过压过流保护足式;
运动指标:最大速度0.5m/s,最大抬腿高度180mm;
轮式运动指标:最大速度1m/s。