一、系统概述
复眼超大视场成像技术采用类似于昆虫复眼的结构和工作原理,通过多个微型透镜(或称为“小眼”)同时捕捉图像,通过融合算法有机组合多个单目望远凝视镜头,呈现出单目成像大视场和超高清的全景画面,分辨率可达亿像素以上。这种工作方式使得复眼感知摄像头能够捕捉到更广阔的视野范围,并提供更高的景深和更清晰的图像细节。同时,该系统还具备快速布控功能,能够在短时间内完成对特定区域或目标的监控和识别。尤其适合机场、演训场等大场景的监控业务使用。
二、业务痛点
(一)覆盖范围受限
传统监控可视角受限,覆盖范围小,缺乏全局监控能力。
(二)不可全景高清回溯
传统抢球联动只能回看枪机覆盖范围内的细节,无法支持全区域的细节回溯。
(三)部署成本高
分散部署数量多,立杆、综合布线等物资及人力投入成本大,后期运维费用高。
(四)像素低
传统监控仍以200万-800万像素为主像素低难以捕获清晰细节。
(五)智能识别受限
像素低导致采集目标数据过小不具备AI智能分析条件。
(六)缺乏三维信息
是客观世界的二维投影,三维信息缺失造成对画面内容理解困难。
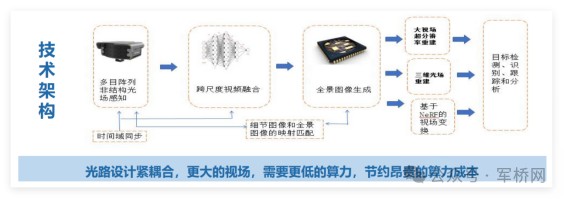
三、核心技术
以光场信息为突破点,设计可以同时采集十亿、百亿像素的机器视觉系统,构建可以支撑大场景、多对象、复杂关系的数据采集与智能理解平台,实现人工智能跨越式进化。
(一)超大视场超高分辨率成像技术
利用基于光场成像的多目阵列式摄像机,基于深度学习网络模型,突破亿级像素,超宽视场和超高分辨率兼具。实现3D重建、分割、显著性检测、物体检测与识别、跟踪等功能。
1.高精密并行阵列式非结构光场数据采集结构颠覆性地打破传统相机视场角与焦距之间无法兼得的矛盾;
2.空域和时域亿级像素高速融合专利算法量级提升全时全域多维感知能力;
3.基于光场信息的AI分析精准探测、跟踪、识别目标,进行目标物的深度测量和空间定位。
(二)基于多目视觉的全光融合光场智能感知技术
利用多光谱多目摄像机重建三维光场,在三维空间对目标进行检测、跟踪,有效降低系统目标感知的误报和漏报率。更可为自动驾驶的提供高可靠的外界环境感知。
1.创新的全光融合光场重建技术,拓展了信息获取能力和分辨率,成为AI大脑更敏锐的眼睛;
2.全光融合光场重建后多维信息有效降低系统感知干扰,提升复杂环境下感知有效性、稳定性和准确度。
四、系统特点
携带方便:置于专用三防箱内,单人可携带,箱体可靠,可机动托运;
快速部署:快速部署,完全展开仅需3min,一键开机,零秒等待;
稳定可靠:视频拼接融合服务器采用嵌入式结构,系统架构简化,更加紧凑小巧,易于部署、配置简便;
操作简单:无需额外配置部署,服务端前置更便于使用;
流线型机身:采用破风流线型设计,高位固定减少风阻,降低画面抖动;
数据存储:箱内集成大容量存储模块,完整记录现场高清全景图像;
供电灵活:配置便携移动电源可连续工作8小时以上,市电供电,更方便;
位置方位上报:实时回传便携式系统的部署位置和视场方位。
五、系统功能
现场一张图:单台1.5亿级像素全景画面,全域、全时、全细节实现现场高清视频同传和记录,图像始终无畸变,无遗漏;
历史回溯:支持全景、细节的回溯,支持对画面持续高清放大,便于事/灾后分析,支持野外独立存储16天;
智能球机:一点即视,“复球联动”,毫秒级超高清细节放大;
带宽自适应:根据现场通信条件智能选择图像码率,更好的观阅画面质量;
多用户多层级操作:支持多用户多层级单位接入“虚拟球机”,同时独立操控;
实时回传:配置5G/4G通讯模块,实时回传现场高清画面;
多终端浏览:PC、Pad、手机多终端接入,操作简单,界面友好。