全部
资讯
产品
关注微信
关注微博
新闻头条
军桥杂志
首页
国防信息化
智慧军营
通讯指挥
大屏显控
虚拟仿真
信息安全
AI计算
安防监控
无人机
作训装备
数码物联
军工电子
媒体展会
方案
技术
商城
产品
模拟训练
模拟器
电子对抗
5G
无人化
信息安全
联合作战
指控中心
仿真推演
心理战
认知域作战
智慧军营
机动指挥
大模型
AI
更多
无人机
|
解决方案
|
技术应用
|
行业资讯
|
无人机管控
|
无人机产品
首页
>
无人机
>
解决方案
> 正文
多功能四足机器人
2025-01-16 10:21:26
来源:
多功能四足机器人是一种仿生腿足式机器人,设计用来模仿动物(如狗、猫、马等)四肢结构和行走方式。它们通过高度复杂的机械结构和精密的控制算法,同时配备多类型的传感器、驱动器、控制系统等,使其具备极强的环境适应能力,能够在多种复杂地形中稳定行走和执行任务。
四足机器人可以在复杂地形中进行侦察、巡逻和运输等任务,提高军事行动的效率和安全性。
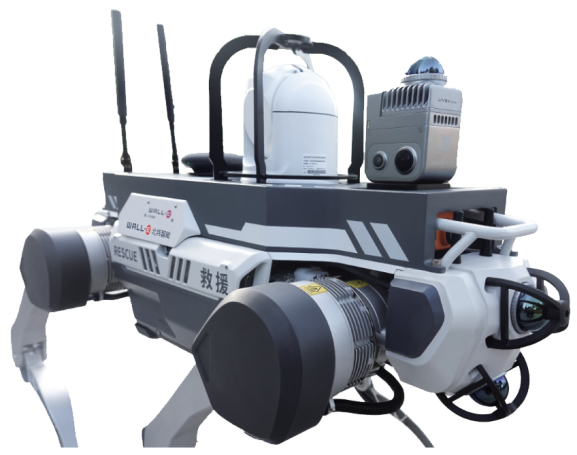
瓦力——四足机器人
中科北纬旗下的瓦力四足机器人可以轻松跨越大于20cm障碍与楼梯、45°内斜坡,在废墟、石堆、碎石、草地等非结构化路面行动自如。全向灵活移动且接触面小,避免改变现场环境,降低二次事故发生概率。IP67防护,在浓烟、有毒、暴雨、-20℃~55℃ 高低温、冰雹等恶劣环境下完成侦察任务。
具备负载作业能力,可负载物资进入灾害现场,对被困人员实施救援。全方位呈现可见光、热成像、三维地形、有害气体、侦察路径等综合信息。全景成像虚拟建图,远距离视距图传,全场景扫描,现场环境重现,为救援决策提供可视化信息,以及对战区现场数据采集与保存。
核心模块
双光谱摄像云台:可见光30倍变焦侦查远处微小目标,热成像仪穿透烟雾遮挡,追踪热源,获取人员与环境温度分布。
三维扫描建模模块:具备实时生成厘米级精度三维地图的能力,为搜救行动提供详尽且即时的空间信息。还能在自然灾害发生后迅速评估建筑物和基础设施的破坏情况,从而辅助救援团队快速制定有效的搜救计划和行动路径。
气体传感器:自动识别检测一氧化碳、二氧化碳、氧气、可燃气体、氮氧化合物、硫化氢等可燃有害气体,并进行实时浓度报警。
自组网:搭建基站与四足机器人的通讯链路,1km远程操控,3km通视距离控制信号、数据、图像传输信号传输,支持中继进一步延展,信号覆盖地下车库及高层建筑等立体环境。
语音对讲内置拾音器/扬声器,实时采集现场声音,了解受困人员情况并进行救援通话。
激光雷达(头尾部共4组):激光点云数据采集,实时扫描外部环境,对障碍物、台阶地形等进行实时建模,用于停障、避障及运动步态自主规划。
虎贲四足机器人
“CETC-虎贲”是中电科机器人研发的一款面向教育科研、特种应用等应用场景的多载荷、多功能四足机器人。
该四足机器人的动力单元采用高密度模组化电机,机身与腿部采用一体化设计,高效的运动控制器使其可以适应于多种复杂的地形和环境。拥有自主训练智能体网络,助力仿生人工智能前沿领域探索可实现上层控制器/端到端两种智能运动控制模式,提升四足机器人自主环境适应性。
站立状态尺寸:650mm*310mm*455mm;
折叠状态尺寸:645mm*310mm*240mm;
重量:12(±0.5)KG(含电池);
续航:1.5-2.5h;
负重:5kg;
速度:2 m/s;
运动能力:可攀爬20度斜坡、可在草地、石子路、沙地行走;
抗击打:274 Nm;
可选配传感器:激光雷达、深度相机、红外相机、蜂鸣器/警报灯;
通信接口:USB、RJ45;
外部供电接口:XT30(5V/12V/24V)。
Q20A-XL型巡逻四足机器人
五八智能旗下的Q20A机器狗自适应各种复杂地形,并且具备强大环境感知能力,能实时收集环境数据并分析处理。通过结合环境感知能力与运动控制能力,Q20A机器狗实现了感控融合,在随机复杂的环境中表现出高机动性与强通过性。
全地形场景适应
运动控制算法:Q20A机器狗通过模仿学习与强化学习在仿真环境中进行大规模训练,获取全地形通用运动控制模型,实现全地形自适应。导航定位算法:搭载雷达、GNSS、视觉相机等多种硬件功能模块,Q20A机器狗可实现多融合定位导航,确保室内、野外等各种复杂场景精准导航,为场景适应提供决策信息支撑。
全视角环境感知
多激光雷达及环视相机组合:Q20A机器狗全身有4颗激光雷达和多个广角低照度相机,360°无死角实时感知,组成强大环境感知系统。高算力模组:Q20A机器狗搭载多块高算力模块,可同步运行多个智能算法,实时对各类感知数据进行融合计算。
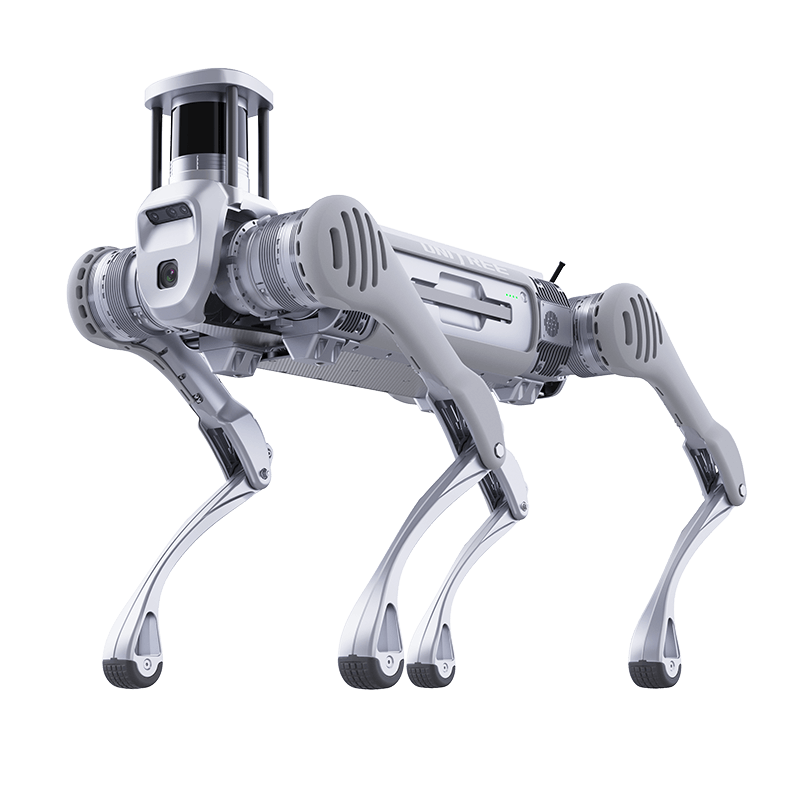
Unitree B2机器狗
宇树旗下的 B2机器狗拥有卓越的持续楼梯攀爬能力,毫不费力地翻山越岭。攀爬时,依旧具有极致的稳定性和平衡能力。持续行走负载大于40kg,提升100%;20kg负载持续行走大于4小时,里程超过15km;续航能力提升200%; 空载持续行走续航大于5小时,里程大于20km。
产品参数
站立尺寸约1098mm×450mm×645mm;
折叠尺寸约880mm×460mm×330m;
重量约60kg(整机,含电池);
电池:容量45Ah(2250Wh),电压 58V;
续航综合运行续航4-6小时;
空载持续行走> 5h,且续航里程> 20km;
20kg 负载持续行走> 4h,且续航里程> 15km;
替换轮足选配;
站立负载最大120kg;
持续行走负载>40kg;
楼梯行走能力最大台阶高度 20~25cm;
攀爬能力正向爬上和爬下高度 40cm 台阶;
工作温度-20℃ ~ 55℃;
斜坡行走能力> 45°;
奔跑速度> 6m/s ;
跳跃深堑宽度0.5~1.2m;
最大跳远距离> 1.6m;
防护等级IP67;
控制和感知算力:标配Intel Core i5(平台功能),Intel Core i7(用户开发);选配Intel Core i7及Nvidia Jetson Orin NX(最多3块);
感知传感器配置:3D 激光雷达 ×1+ 深度相机 ×2+ 光学相机 ×2( 不同配置有所差异);
外置接口:1000M-Base-Ethernet×4 USB3.0×4;12V×4 5V×1 24V×4 BAT×1。
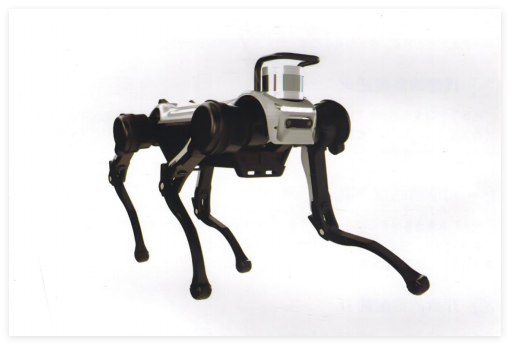
绝影——灵敏型四足机器人
云深处科技研发的“绝影”是一款面向行业应用和场景展示的灵敏型四足机器人,可以协同(代替)人类到达任何可以到达的地方,具有优越的环境适应能力、优异的动态平衡能力和精准的环境感知能力,通过在安全荷载区内搭载不同应用场景的功能模块,可将四足机器人的移动优越性与功能模块的业务化进行有机融合。
灵敏的仿生步态
仿生足式结构设计,离散式落足,让“绝影”具备快速行走、跑跳、爬坡、上下台阶、匍匐、摔倒爬起等运动能力。灵敏稳定的仿生步态,更接近并适应人居和自然环境,无需改造场地即可到达想去的地点,极大拓展了机器人的可达范围和到达便捷度。
优越的环境适应
“绝影”可以兼顾运动的灵活性和稳定性,弥补了传统的轮/履式机器人对复杂路面适应能力的不足,可以在草地、石子路、砖块路、斜坡、台阶等非结构性地面实现行走式移动,对环境具有更高的适应性。
精准的感知决策
“绝影”搭载的智能感知模块,融合了激光、视觉和惯导等多种传感器,可以快速构建复杂环境的3D地图,完成高精度的定位导航,感测并识别设备(物体)的位置和信息,为应用场景各设备单元提供有机连接。
开放的选配能力
标准化二次开发接口,绝影可提供多规格扩展性的开放需求,通过搭载的各类应用模块、智能硬件和其他传感器,为不同的行业场景提供高可用性,安全性和可靠性的应用需要,实现人类与机器人之间的直接合作。
快捷的自主充电
支持自主充电,通过对充电桩的自主识别、对接,自动完成整个充电过程。自主充电的便捷性,可以让充电运行全过程免人工介入,“绝影”充满电量后便可进入工作状态执行工作任务。
关键词:
无人化
上一篇:
固定翼无人机半实物仿真系统
下一篇:
最后一页
索取“此产品”详细资料,请留言
*姓名:
*手机:
*邮寄地址:
相关阅读
固定翼无人机半实物仿真系统
热点文章
单兵折叠翼巡飞弹与单兵双旋翼无人机
1
极客桥系留滞空救援系统
2
天墙反无人机系统解决方案
3
多媒体互动数字沙盘系统设计方案
4
无人机综合防御管控系统
5
适用于无人机的多路视频图像快速拼接系统
6
黄鹄科技亮相中关村武器装备军民融合创新发展论坛 ——矢志光电前沿科技
7
多款系留多旋翼无人机系统
8
反无人机系统—智能“立体”安防
9
「重磅」一文揽尽最值得关注警用无人机企业 TOP 20
10
轻准科技 QZU-01察打一体武装无人机
热点技术
基于无人机航迹规划优化的几种新型仿生智能优化算法综述
星际联盟-低空安全系统平台
适用于无人机的多路视频图像快速拼接系统
多款系留多旋翼无人机系统
反无人机系统—智能“立体”安防
中睿无人机|SkyCells无人机智能巡检系统
诱骗式静态区域无人机防御系统
无人机蜂群战术到底有多厉害
基于无人机航迹规划优化的几种新型仿生智能优化算法综述
新一代小型运输型无人直升机
采用组合滤波算法的无人机航向测量系统研究
云世纪科技U-Care Defense无人机监管反制系统简介
热点方案
集心理绞杀 + 精准威慑 + 智能机动于一体的战术大脑——无人化心理战车
FPV无人机协同战术训练系统
极客桥系留滞空救援系统
多媒体互动数字沙盘系统设计方案
黄鹄科技亮相中关村武器装备军民融合创新发展论坛 ——矢志光电前沿科技
轻准科技 QZU-01察打一体武装无人机
天龙智控科一站多机系统无人机亮相第十一届中国国际国防电子展
Ligh-TV4 新一代无人机系留基站
无人机空中平台激光组网通信
“雀鹰"格斗无人机
专为战斗目的设计的可挂载导弹的丝绒黄蜂无人机
DARPA科技成果介绍(一):精确制导武器、隐形技术、无人机(UAVS)
产品推荐
“雀鹰"格斗无人机
长航时固定翼无人机 DT26X
赛鹰SY14KT系留旋翼无人机
CSD-PB-85R型排爆侦查机器人
六轮全地形独立驱动全线控无人车辆
BL-JS400-GRQ无人机防御手持式干扰抢